Übertragungsbeziehungen der Stabtheorie I. Ordnung¶
Important
(todo: Referenzen!!!)
Grundlagen¶
Ausgangspunkt der Herleitung der Übertragungsbeziehungen für Stäben mit linear veränderlicher Höhe sind die die Differentialgleichungen (1) des Biegeproblems der Stabtheorie I. Ordnung
Important
Die Differnetialgleichungen sind spezialisiert für den Fall der Schubstarrheit \(G\tilde{A}(x)=\infty\)
Integrationsschritte¶
Die gesuchten, von x abhängigen, Zustandsgrößen ergeben sich durch Schritt für Schritt aufintegrieren der Differnetialgleichungen (1). Nach jedem Integrationsschritt werden die Integrationskonstanten auf die andere Seite gebracht sowie die lastabhängigen Terme zu sogenannte Lastgliedern zusammengefasst. (todo: ref Funktion load_integrals). Zusätzlich wird zur Vereinfachung der Integrale die dimensionslose Funktion \(f(x)\) eingeführt. Dabei können die von x Abhängigen Querschnittswerte einfach über die Funktion cs (todo: Link zu Querschnittswerten) bestimmt werden.
Alle \(b(x)\) - Funktionen (transfer_relation_bj - future_todo: link) sowie die Lastintegrale \(V^L(x),~M^L(x),~\varphi^L(x),~w^L(x)\) (load_integrals - future_todo: link) werden in stanpy (todo: eigenen Schriftzug) mittels numerischer Integration über das scipy.integrate.quad (todo: link zu scipy) gelöst.
Lastintegrale für die Querkraftbelastung: (todo: Abbildungen, check sign)
Lastintegrale für die Momentenbelastung (todo: check sign):
Note
(todo: minimal working example)
Hint
(todo: Maculay Operator beschreiben + Integrationsregel)
Note
(todo: minimal working example)
Hint
(todo: Maculay Operator beschreiben + Integrationsregel)
Aufgrund der Linearität der Differentialgleichungen können die Lastglieder der verschiedenen Belastungtypen superpositioniert werden. Daher folgt:
Zusammenfassen zu den Übertragungsbeziehungen¶
Durch das Anschreiben der Gleichungen aus (2) und (3) in Matrix Vektor Form, ergeben sich die Übertragungsbeziehungen für einen Stab mit linear veränderlicher Höhe vom Stabanfang bis zu einem beliebigen Punkt x zu:
(DEV) Pre-implementation¶
Note
(DEV) - Development Sections dienen nur der Entwicklung und werden vor Release gelöscht
(todo: Löschen vor Release)
Definition der Problemstellung/Kenngrößen
für jeden Stab - Defintion der Randbedingungen (wenn vorhanden) - Berechnen der Querschnittswerte - Definition des Stab-Dictionarys - Berechnen der Übertragungsbeziehungen
Zusammenführen der Übertragungsbeziehungen
Lösen durch Randbedingungen
Rückrechnen der Zustandsvektoren am Stabanfang und Stabende (für jeden Stab)
Einhängen der Belastungsfunktionen (TH I)
Numerisches Lösen über Stabpunkte über (einhängen von Curve-Fit) (TH II)
(DEV) Userbility-Studie¶
Warning
(DEV) - Development Sections dienen nur der Entwicklung und werden vor Release gelöscht
import stanpy as stp
from sympy.abc import x
# Definition der Problemstellung ################
EI = ... # kN/m²
q = ... # kN/m
l = ... # m
P = ... # kN
b, h = ..., ... # m
Variation GEOM 0¶
Note
- (!) Geometrie:
jedem Stab ist eine Länge zugeordnet
- Materialeigenschaften:
kann direkt zugeordnet werden (analog zu allen Varianten)
- Belastung: (analog zu allen Varianten)
q - kann direkt zugeordnet werden
F - über Tupel (dim=2) bestehnd aus Kraft und Abstand x_j zum Knotenanfang
geplant: zus. Rotation für die Kraft F (dim=3)
- Randbedingunen/Übergangsbedingungen:
werden über Stabanfangsbedingung “bc_i” und Stabendbedingung “bc_k” zugeordnet
- Nachlauf/Solve:
Stäbe werden in Stabliste zusammengefasst und übergeben bzw. gesolved
1 roller_support = {"w":0, "M":0} # Gleitlager
2 hinge = {"M":0}
3 fixed_support = {"w":0, "phi":0} # Einspannung
4
5 s1 = {"l":l, # (!)
6 "EI":EI,
7 "q":q, "F":(P,l/2),
8 "bc_i":roller_support, "bc_k":hinge}
9
10 s2 = {"l":l, # (!)
11 "EI":EI,
12 "q":q, "F":(P,l/2),
13 "bc_i":{}, "bc_k":fixed_support}
14
15 s_list = [s1,s2]
16
17 s_list = stp.tr_solve(s_list)
Variation GEOM 1 = BC 0¶
Note
- (!) Geometrie:
jedem Stab ist ein Anfangsknoten k_i und ein Endknoten k_k zugeordnet
- Materialeigenschaften:
kann direkt zugeordnet werden (analog zu allen Varianten)
- Belastung: (analog zu allen Varianten)
q - kann direkt zugeordnet werden
F - über Tupel (dim=2) bestehnd aus Kraft und Abstand x_j zum Knotenanfang
geplant: zus. Rotation für die Kraft F (dim=3)
- (!) Randbedingunen/Übergangsbedingungen:
werden über Stabanfangsbedingung “bc_i” und Stabendbedingung “bc_k” zugeordnet
- Nachlauf/Solve:
Stäbe werden in Stabliste zusammengefasst und übergeben bzw. gesolved
1 node_1 = (x1,y1)
2 node_2 = (x2,y2)
3 node_3 = (x3,y3)
4
5 roller_support = {"w":0, "M":0} # Gleitlager
6 hinge = {"M":0}
7 fixed_support = {"w":0, "phi":0} # Einspannung
8
9 s1 = {"k_i":node_1, "k_k": node_2, # (!)
10 "EI":EI,
11 "q":q, "F":(P,l/2),
12 "bc_i":roller_support, "bc_k":hinge} # (!)
13
14 s2 = {"k_i":node_2, "k_k": node_3, # (!)
15 "EI":EI,
16 "q":q, "F":(P,l/2),
17 "bc_i":{}, "bc_k":fixed_support} # (!)
18
19 s_list = [s1,s2] # oder s_list = [s2,s1]
20
21 s_list = stp.tr_solve(s_list)
Variation BC 1¶
Note
- Geometrie:
jedem Stab ist ein Anfangsknoten k_i und ein Endknoten k_k zugeordnet
- Materialeigenschaften:
kann direkt zugeordnet werden (analog zu allen Varianten)
- Belastung: (analog zu allen Varianten)
q - kann direkt zugeordnet werden
F - über Tupel (dim=2) bestehnd aus Kraft und Abstand x_j zum Knotenanfang
geplant: zus. Rotation für die Kraft F (dim=3)
- (!) Randbedingunen:
werden über Stabanfangsbedingung “bc_i” und Stabendbedingung “bc_k” zugeordnet
- (!) Übergangsbedingung:
durch hinzufügen eines Gelenks in Stabliste
- Nachlauf/Solve:
Stäbe werden in Stabliste zusammengefasst und übergeben bzw. gesolved
1 roller_support = {"w":0, "M":0} # Gleitlager
2 hinge = {"M":0}
3 fixed_support = {"w":0, "phi":0} # Einspannung
4
5 s1 = {"k_i":(x1,y1), "k_k": (x2,y2),
6 "EI":EI,
7 "q":q, "F":(P,l/2),
8 "bc_i":roller_support} # (!)
9
10 s2 = {"k_i":(x1,y1), "k_k": (x2,y2),
11 "EI":EI,
12 "q":q, "F":(P,l/2),
13 "bc_k":fixed_support} # (!)
14
15 s_list = [s1,hinge,s2] # (!)
Variation BC 2¶
Note
- Geometrie:
jedem Stab ist ein Anfangsknoten k_i und ein Endknoten k_k zugeordnet
- Materialeigenschaften:
kann direkt zugeordnet werden (analog zu allen Varianten)
- Belastung: (analog zu allen Varianten)
q - kann direkt zugeordnet werden
F - über Tupel (dim=2) bestehnd aus Kraft und Abstand x_j zum Knotenanfang
geplant: zus. Rotation für die Kraft F (dim=3)
- (!) Randbedingunen/Übergangsbedingung:
Reihenfolge in Stabliste definiert die Rand und Übergangsbedingungen
- Nachlauf/Solve:
Stäbe werden in Stabliste zusammengefasst und übergeben bzw. gesolved
1 roller_support = {"w":0, "M":0} # Gleitlager
2 hinge = {"M":0}
3 fixed_support = {"w":0, "phi":0} # Einspannung
4
5 s1 = {"k_i":(x1,y1), "k_k": (x2,y2),
6 "EI":EI,
7 "q":q, "F":(P,l/2),
8 }
9
10 s2 = {"k_i":(x1,y1), "k_k": (x2,y2),
11 "EI":EI,
12 "q":q, "F":(P,l/2),
13 }
14
15 s_list = [roller_support, s1, hinge, s2, fixed_support] # (!)
# Lösen des Gleichungssystems ###################
s = stp.tr_solve(s_list)
Eingliedrig (R-Querschnitt, konstante Höhe)¶
stanpy black-box (Level 0)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 b, h = 0.2, 0.3 # m
11
12 # Stab 1 ########################################
13
14 cs1_prop = stp.cs(b=b, h=h) # oder EI = E*b*h**3/12
15 bc_a = {"w":0, "M":0} # Gleitlager in a
16 bc_b = {"w":0, "phi":0} # Einspannung in b
17 s = {"l":l, "q":q, "F":(P,l/2),"EI":E*cs1_prop["I"], "bc_i":bc_a, "bc_k":bc_b}
18
19 # Lösen des Gleichungssystems ###################
20
21 s = stp.tr_solve(s)
22
23 # Plotten der Ergebnisse #########################
24
25 fig, (ax_M, ax_V) = plt.subplots(2)
26
27 stp.plot(s, ax=ax_M)
28 stp.plot_M(s, ax=ax_M)
29
30 stp.plot(s, ax=ax_V)
31 stp.plot_V(s, ax=ax_V)
32
33 plt.show() # (todo: show py-Plot)
stanpy step-by-step (Level 1)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 b, h = 0.2, 0.3 # m
11
12 # Stab 1 ########################################
13
14 (todo)
without stanpy (Level -1)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 b, h = 0.2, 0.3 # m
11
12 # Stab 1 ########################################
13
14 (todo)
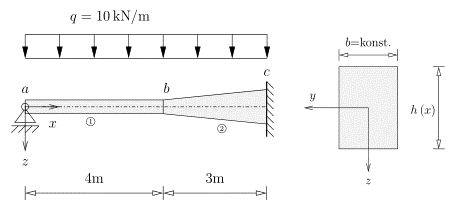
Eingliedrig (R-Querschnitt, veränderliche Höhe)¶
stanpy black-box (Level 0)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 b, ha, hb = 0.2, 0.3, 0.2 # m
11
12 # Stab 1 ########################################
13
14 hx = ha+(hb-ha)/l*x # m
15 cs1_prop = stp.cs(b=b, h=hx)
16 bc_a = {"w":0, "M":0} # Gleitlager in a
17 bc_b = {"w":0, "phi":0} # Einspannung in b
18 s = {"l":l, "q":q, "F":(P,l/2),"EI":E*cs1_prop["I"], "bc_i":bc_a, "bc_k":bc_b}
19
20 # Lösen des Gleichungssystems ###################
21
22 s = stp.tr_solve(s)
23
24 # Plotten der Ergebnisse#########################
25
26 fig, (ax_M, ax_V) = plt.subplots(2)
27
28 stp.plot(s, ax=ax_M)
29 stp.plot_M(s, ax=ax_M)
30
31 stp.plot(s, ax=ax_V)
32 stp.plot_V(s, ax=ax_V)
33
34 plt.show() # (todo: show py-Plot)
stanpy step-by-step (Level 1)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 b, ha, hb = 0.2, 0.3, 0.2 # m
11
12 # Stab 1 ########################################
13
14 (todo)
without stanpy (Level -1)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 b, ha, hb = 0.2, 0.3, 0.2 # m
11
12 # Stab 1 ########################################
13
14 (todo)
Eingliedrig (I-Querschnitt, konstante Höhre)¶
stanpy black-box (Level 0)¶
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 t = 0.2
11 s = 0.08
12 b, ha, hb = 0.2, 0.3, 0.2 # m
13
14
15 # Stab 1 ########################################
16 hx = ha+(hb-ha)/l*x # m
17
18 b_vec = np.array([b,s,b]) # Breiten der QS
19 h_vec = np.array([t, hx-2*t, t]) # Höhen der QS
20
21 cs1_prop = stp.cs(b=b_vec, h=h_vec)
22 bc_a = {"w":0, "M":0} # Gleitlager in a
23 bc_b = {"w":0, "phi":0} # Einspannung in b
24 slab = {"l":l, "q":q, "P":(P, l/2), "EI":E*cs1_prop["I"], "bc_i":bc_a, "bc_k":bc_b}
25
26 # Lösen des Gleichungssystems ###################
27
28 slab = stp.tr_solve(slab)
29
30 # Plotten der Ergebnisse#########################
31
32 fig, (ax_M, ax_V) = plt.subplots(2)
33
34 stp.plot(slab, ax=ax_M)
35 stp.plot_M(slab, ax=ax_M)
36
37 stp.plot(slab, ax=ax_V)
38 stp.plot_V(slab, ax=ax_V)
39
40 plt.show() # (todo: show py-Plot)
stanpy step-by-step (Level 1)¶
(todo: Abbildungen)
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 P = 3 # kN
10 t = 0.2
11 s = 0.08
12 b, ha, hb = 0.2, 0.3, 0.2 # m
13
14 # Stab 1 ########################################
15
16 (todo)
Eingliedrig (I-Querschnitt, veränderliche Höhe)¶
(todo) Zweigliedrig - (R-Querschnitt) ==============================
stanpy black-box (Level 0)¶
1 import stanpy as stp
2 from sympy.abc import x
3
4 # Definition der Problemstellung ################
5
6 E = 3*10**7 # kN/m²
7 q = 10 # kN/m
8 l = 2 # m
9 b, ha, hb, hc = 0.2, 0.3, 0.3, 0.4 # m
10
11 # Stab 1 ########################################
12
13 cs1_prop = stp.cs(b=b, h=ha)
14 bc_a = {"w":0, "M":0} # Gleitlager in a
15 s_1 = {"l":l, "q":q, "E":E, "I":cs1_prop["I"], "bc_i":bc_a}
16
17 # Stab 2 ########################################
18
19 hx = hb+(hb-hc)/l*x # m
20 cs2_prop = stp.cs(b=b, h=hx)
21 bc_c = {"w":0, "phi":0} # Einspannung in c
22 s_2 = {"l":l, "q":q, "E":E, "I":cs2_prop["I"], "bc_k":bc_c}
23
24 # Lösen des Gleichungssystems + Injektion #######
25
26 s_1, s_2 = stp.tr_solve(s_1, s_2)
27
28 # Plotten #######################################
29
30 fig, ax = plt.subplots()
31 stp.plot(s1,s2, ax=ax, m=True)
32 plt.show() # (todo: show py-Plot)
Hint
Ein leeres Dictionary bc = {} für die Randbedingung bedeutet, dass alle Zustandsgrößen unbekannt sind
stanpy step-by-step (Level 1)¶
1 import stanpy as stp
2 from sympy.abc import x
3 import matplotlib.pyplot as plt
4
5 # Definition der Problemstellung ################
6
7 E = 3*10**7 # kN/m²
8 q = 10 # kN/m
9 l = 2 # m
10 b, ha, hb, hc = 0.2, 0.3, 0.3, 0.4 # m
11
12 # Stab 1 ########################################
13
14 cs1_prop = stp.cs(b=b, h=ha)
15 s1 = {'l':l, 'q':q, 'EI':E*cs1_prop["I"]}
16 li = stp.tr1_load_integrals(s1)
17 bj = stp.tr1_bj_function(s1)
18 fba = stp.tr(s1)
19
20 # Stab 2 ########################################
21
22 hx = ha+(hb-ha)/l*x # m
23 cs2_prop = stp.cs(b=b, h=hx)
24 s_2 = {"l":l, "q":q, "EI":E*cs2_props["I"]}
25
26 li = stp.tr1_load_integrals(s1)
27 bj = stp.tr1_bj_function(s1)
28 fcb = stp.tr(s2)
29
30 # Stabzug 1-2 ###################################
31
32 f_ca = f_cb * f_ba
33
34 # Lösen des Gleichungssystems ###################
35
36 z_a = {"w":0, "M":0}
37 z_c = {"w":0, "phi":0}
38 z_c, z_a = stp.solve_tr(z_c, f_ca, z_a)
39 z_b = f_ba*z_a
40
41 (todo: besseren Namen für inject_function finden)
42 s_1 = stp.inject_function(s_1, z_a, z_b) # Einhängen der Zustandsfunktionen
43 s_2 = stp.inject_function(s_2, z_b, z_c) # Einhängen der Zustandsfunktionen
44
45 # Plotten #######################################
46
47 fig, ax = plt.subplots()
48 stp.plot(s1,s2, ax=ax, m=True)
49 plt.show()
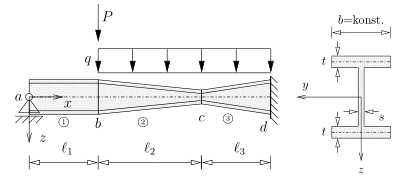
Dreigliedrig (I-Querschnitt)¶
stanpy black-box (Level 0)¶
import stanpy as stp
from sympy.abc import x
# Definition der Problemstellung ################
(todo: richtigen Werte einsetzen)
E = 3*10**7 # kN/m²
q = 10 # kN/m
l1, l2, l3 = 1, 2, 1 # m
t = 0.2
s = 0.08
b, ha, hb, hc, hd = 0.2, 0.3, 0.3, 0.2, 0.3 # m
b_vec = np.array([b,s,b]) # Breiten der QS
# Stab 1 ########################################
h_vec = np.array([t, ha-2*t, t]) # Höhen der QS
cs1_prop = stp.cs(b=b_vec, h=h_vec)
bc_a = {"w":0, "M":0} # Gleitlager in a
bc_b = {"dV":P} # Einzelkraft in b (positiv in z-Richtung)
s_1 = {"l":l1, "EI":E*cs1_prop["I"], "bc_i":bc_a, "bc_k":bc_b}
# Stab 2 ########################################
hx = hb-(hb-hc)/l2*x # m
h_vec = np.array([t, hx-2*t, t]) # Höhen der QS
cs2_prop = stp.cs(b=b_vec, h=h_vec)
s_2 = {"l":l2, "q":q, "EI":E*cs2_prop["I"]}
# Stab 3 ########################################
hx = hb-(hb-hc)/l3*x # m
h_vec = np.array([t, hx-2*t, t]) # Höhen der QS
cs2_prop = stp.cs(b=b_vec, h=h_vec)
s_2 = {"l":l2, "q":q, "EI":E*cs2_prop["I"]}
# Lösen des Gleichungssystems + Injektion #######
s_1, s_2, s_3 = stp.tr_solve(s_1, s_2, s_3)
# Plotten #######################################
fig, ax = plt.subplots()
stp.plot(s_1,s_2, ax=ax, m=True)
plt.show() # (todo: show py-Plot)
Hint
Ein leeres Dictionary bc = {} für die Randbedingung bedeutet, dass alle Zustandsgrößen unbekannt sind